HMR-KK05‚©‚з‚М•ПЌX“_
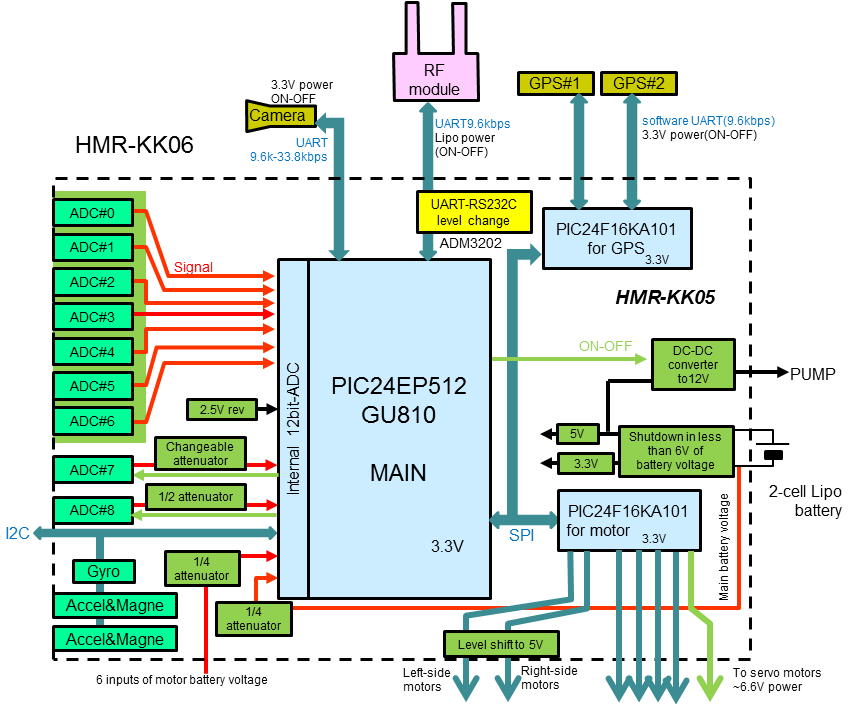
ЃEMain PIC‚рPIC24EP512GU810(RAM52k)‚Й•ПЌX
ЃEMotor PIC‚Ё‚ж‚СGPS PIC‚рPIC24F16KA101(RAM1.5k)‚Й•ПЌXЃD
GPS‚Ц‚МђЪ‘±‚Н‚Q‚В‚Ж‚аPIC‚МѓnЃ[ѓhѓEѓGѓA‚МUART‚рЋg—pЃD
‚±‚М2‚В‚МѓTѓuѓRѓ“ѓsѓ…Ѓ[ѓ^‚НЃCMainPIC‚ж‚и“dЊ№‚рON-OFF‚·‚йЃD
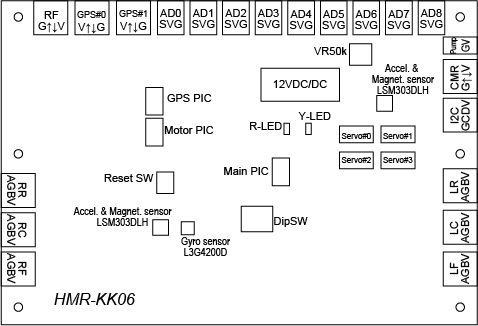
ЃE‰Б‘¬“xѓZѓ“ѓTЃ[KXM52-1050‚р”pЋ~
ЃEѓIѓ“ѓ{Ѓ[ѓhѓZѓ“ѓTЃ[‚Ж‚µ‚Д‰Б‘¬“xѓZѓ“ѓTЃCЋҐ‹CѓZѓ“ѓTЃCѓWѓѓѓCѓЌѓZѓ“ѓT‚рI2CђЪ‘±‚ЕѓIѓ“ѓ{Ѓ[ѓh“‹ЌЪ
‰Б‘¬“xЃ•ЋҐ‹CѓZѓ“ѓT‚Н LSM303DLH‚р2ЊВ“‹ЌЪ
ѓWѓѓѓCѓЌѓZѓ“ѓT‚НL3G4200D‚р1ЊВ“‹ЌЪ
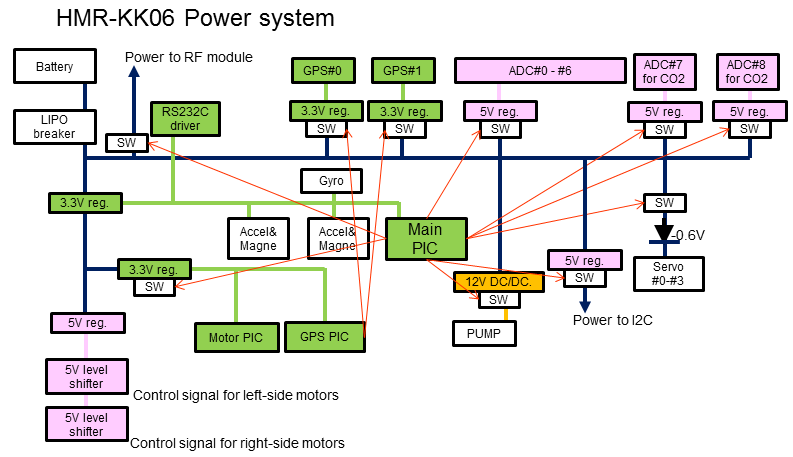
ЃERFmodule‚Ц‚МѓRѓlѓNѓ^‚р•ПЌXЃD4ѓsѓ“‚Ж‚µЃC“dЊ№‚а‚±‚±‚©‚з‚Ж‚йЃD
ЃEPIC‚М–ўЋg—pѓsѓ“‚НЃCAD‚рЋќ‚Вѓsѓ“‚МЏкЌ‡ЃCAD‚ЙѓZѓbѓg‚µѓCѓ“ѓvѓbѓg‚ЙђЭ’и‚·‚йЃDAD‚рЋќ‚Ѕ‚И‚ўѓsѓ“‚НѓfѓWѓ^ѓ‹ѓAѓEѓgѓvѓbѓg‚ЙђЭ’и‚·‚йЃD
Port setting PortA PortB PortC PortD PortE PortF PortG
ADconverter setteing
Function setting
Non-connected pins with ADC are set as ADC and digital input. Non-connected pins without ADC are set as digital output.
!CAUTION! GPIO pins of B11 and B15 must be set as INPUT and are unusable.
| Pin | Port | ADC | Special | etc | Power | Use | Setting | Function |
| 1 | A5 | nMCLR | Vpp | Vpp | Ѓ› | I | nMCLR Vpp | |
| 2 | A0 | AN00 | PGC2 | Vref+/CN2 | Ѓ› | O | PowerSW of GPS#1 | |
| 3 | A1 | AN01 | PGD2 | Vref-/CN3 | AD(I) | |||
| 4 | B0 | AN02 | U2Tx | PGD1/C1IND/C2INB/CN4 | Ѓ› | O | U2Tx to GPS#1 | |
| 5 | B1 | AN03 | U2Rx | PGC1/C1INC/C2INA/U2BCLK/CN5 | Ѓ› | I | U2Rx from GPS#1 | |
| 6 | B2 | U1Rx | U1BCLK/CN6 | Ѓ› | I | U1Rx from GPS#0 | ||
| 7 | A2 | AN04 | OSCI/CLKI/C1INB/C2IND/CN30 | Ѓ› | O | PowerSW of GPS#0 | ||
| 8 | A3 | AN05 | OSCO/CLKO/CINA/C2INC/CN29 | AD(I) | ||||
| 9 | B4 | PGD3 | SOSCI/nU2RTS/CN1 | Ѓ› | O | PGD | ||
| 10 | A4 | PGC3 | SOSCO/T1CK/nU2CTS/CN0 | Ѓ› | O | PGC | ||
| 11 | B7 | U1Tx | INT0/CN23 | Ѓ› | O | U1Tx to GPS#0 | ||
| 12 | B8 | SCL1 | nU1CTS/CN22 | O | ||||
| 13 | B9 | SDA1 | nU1RTS/CN21 | O | ||||
| 14 | A6 | OC1/IC1/C2OUT/INT2/CTED1/CN8 | O | |||||
| 15 | B12 | AN12 | SCK1 | HLVDIN/CTED21/CN14 | Ѓ› | I | SCK of SPI | |
| 16 | B13 | AN11 | SDO1 | CTPLS/CN13 | Ѓ› | O | SDO of SPI | |
| 17 | B14 | AN10 | SDI1 | Cvref/RTCC/OCFA/C1OUT/INT1/CN12 | Ѓ› | I | SDI of SPI | |
| 18 | B15 | nSS1 | T2CK/T3CK/CN11 | Ѓ› | I | nSS of SPI | ||
| 19 | Vss | Ѓ› | ||||||
| 20 | Vdd | Ѓ› |
Non-connected pins with ADC are set as ADC and digital input. Non-connected pins without ADC are set as digital output.
Non-connected pins with ADC are set as ADC and digital input. Non-connected pins without ADC are set as digital output.
CAUTION!
Outputs for the wheel motors are negative logic.
Outputs for the servo motors are positive logic
Mobile Sensor for Volcanic Observation "HOMURA"