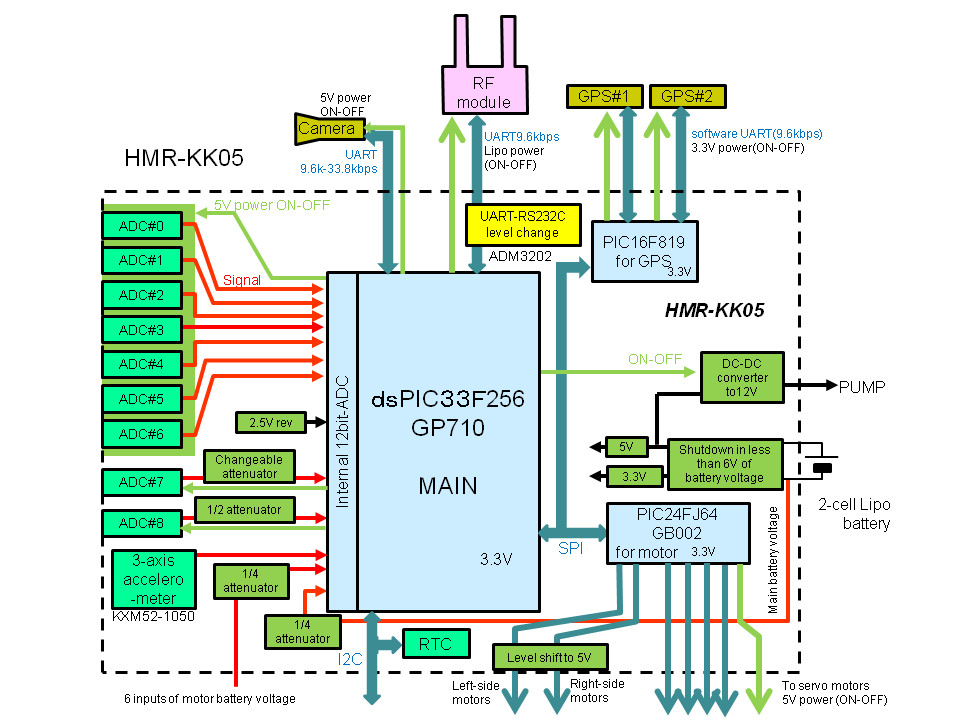
HMR-KK04偐傜偺曄峏揰
丒Motor PIC傪PIC24FJ64GB002偵曄峏丏
偙偺曄峏偵敽偄丆偙偺PIC偵傛傝丆幵椫儌乕僞偲偲傕偵丆僒乕儃儌乕僞傪僐儞僩儘乕儖偡傞偙偲偵側傞丏
丒廐寧偺RTC儌僕儏乕儖傪搵嵹丏I2C偵偰MainPIC偵愙懕丏
丒Main揹尮偺揹埑傪MainPIC偱尒傟傞傛偆偵偟偨丏
丒RFmodule傊偺揹尮傪Main婎斦偐傜暘攝偡傞丏傑偨丆RFmodule偺ON/OFF傪峴偆丏
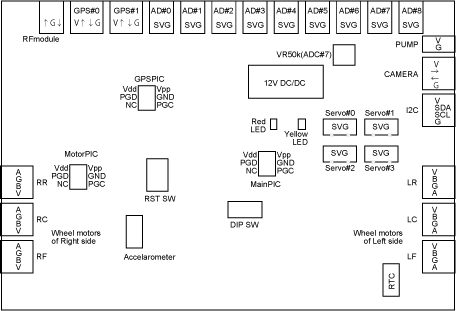
Port setting PortA PortB PortC PortD PortE PortF PortG
ADconverter setteing
Function setting
NOTE
GPIO pins of B11 and B15 must be set as INPUT and are unusable.
ADC of the accelerometer outputs must be done as Vref+ = Vdd (3.3V).
| Function | Pin |
| Rx to GPS#0 | A0 |
| Tx to GPS#0 | A1 |
| PWR SW of GPS#0 (Turn on in H) | A7 |
| Rx to GPS#1 | A2 |
| Tx to GPS#1 | A3 |
| PWR SW of GPS#1 (Turn on in H) | A4 |
CAUTION!
Outputs for the wheel motors are negative logic.
Outputs for the servo motors are positive logic
Mobile Sensor for Volcanic Observation "HOMURA"