かわロボシリーズ
かわさきロボット競技大会のロボットです.
*オリジナル機体製作者の方に無許可で入手可能な資料をもとにモデルを作成・公開しています.問題がある場合,説明に誤りのある場合は対応致しますのでご一報ください.
|
ロボット名
(シミュレータコード名) |
画像 |
機体説明 |
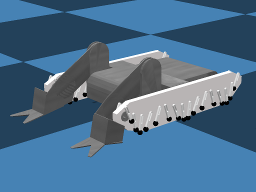
ヒスイカズラ
hisuikazura |
 |
第8回大会出場.
開発者:東工大ロ技研
戦績:ベスト32
受賞:日本マクドナルド賞
シミュレーション難度:C
コメント:平行リンク脚.旋回性の悪さは実物と同じ. |
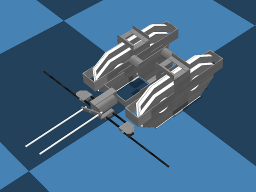
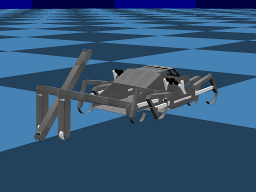
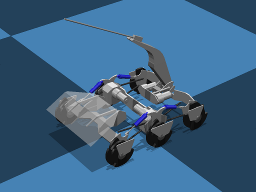
らぴすらずり
lapis |
 |
第10回大会出場.
開発者:らぐお電工
戦績:ベスト16
受賞:ユニーク賞
シミュレーション難度:B
コメント:ダクテッドファンはまだ回りません.
|
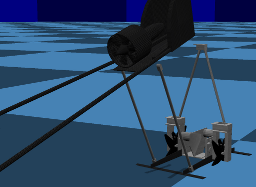
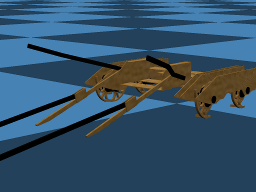
まるちぷらい
multiply |
 |
第10回大会自律機部門出場
開発者:東工大ロ技研
受賞:マイコン技術賞
シミュレーション難度:A
|
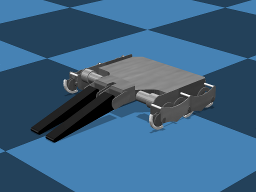
Rocky8
rocky8 |
 |
第13回大会出場
同型機:Rocky9
シミュレーション難度:B
コメント:タイヤ脚の軌道は専用関節で再現してます
|
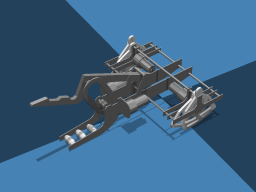
Rocky13
rocky13 |
 |
第13回大会出場
同型機:Rocky10 Rocky11 Rocky12
シミュレーション難度:B
コメント:足が多いのでスライダクランクは専用関節にしました.それでも計算負荷高いです. |
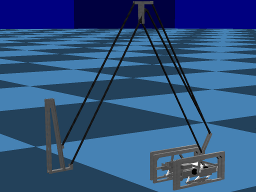
カトレア ver.1999
cattleya99 |
 |
第6回大会出場
戦績:準優勝
同型機:たんぽぽ ver.1999
シミュレーション難度:A
コメント:閉リンクが多いのでシミュレーション難度高いです.旋回性が今一つ.
|
たんぽぽ ver.2004
tanpopo |
 |
第11回大会出場
戦績:準優勝
同型機:たんぽぽ ver.2003 ver.2005
シミュレーション難度:C
|
機神皇
kishin |
 |
第18回大会出場
受賞:実行委員長賞
シミュレーション難度:B
コメント:強い力が加わるとはずみでヘッケンリンクがひっくり返る現象を避けるために専用関節で実装しました
定義ファイルにコメントで解説を加えていますのでシミュレーションモデル作成の参考にしてください.
|
カズラマギカ
kazuramagica |
 |
第19回大会出場 実機審査落ち(記録あり)
開発者:tazz
シミュレーション難度:C
機体コメント:ヘッケンリンク単レイヤー6脚歩行の実験機.自律制御もするつもりだったが間に合わず.
|
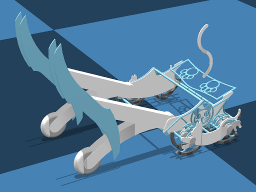
クシザシタロウXVI
kushizashi |
 |
第19回大会出場 特別戦出場
機体コメント:かなりアレ(褒め言葉)なサスペンション構造をしているため再現に苦戦しました.ゴム足は再現できてません.
|
ellipse
ellipse |
 |
第20回大会出場 特別戦出場
機体コメント:楕円ラッククランクが素敵だったのでシミュレーションしてみました.資料が少ないため実機とは細部が違っていると思います.
|
雪猫神楽
yukineko |
 |
第19回大会出場 デザイン賞
機体コメント:彫り物の再現が一番大変でした.再現性低くてすみません.
|
公式リング ver.2012
field2012 |
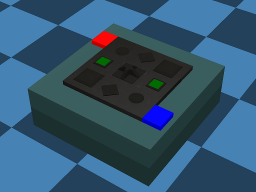 |
第19, 20回大会公式リング
|
20周年記念イベントリング
field20th |
 |
20周年記念集団戦リング
実物を見てないので適当です
|
乗り物シリーズ
|
ロボット名
(シミュレータコード名) |
画像 |
機体説明 |
COMS
coms |
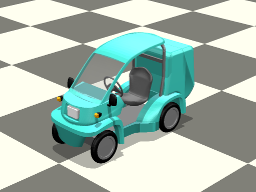 |
T社の小型EV
研究でお世話になってます. |
T型フォード
model_t |
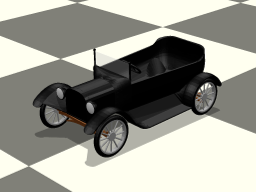 |
歴史に出てくるアメリカF社の名車
バリエーションが多いみたいです. |
建機シリーズ
|
ロボット名
(シミュレータコード名) |
画像 |
機体説明 |
SK450
sk450 |
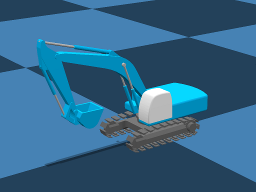 |
建機メーカK社のパワーショベル
シミュレーション難度:A
コメント:1/20スケール.クローラの下駄(?)の数は計算リソース節約のために実物の半分にしてあります. |
GTK1100
gtk1100 |
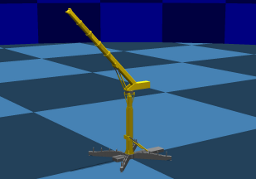 |
建機メーカG社のクレーン
シミュレーション難度:B
コメント:1/20スケール.自動アセンブリで組み上げ工程を再現しました. |
研究ロボットシリーズ
|
ロボット名
(シミュレータコード名) |
画像 |
機体説明 |
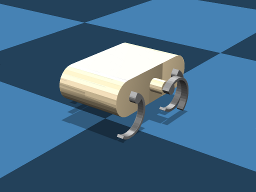
Titan VIII
titan8 |
 |
東工大旧広瀬研の4足歩行ロボット
シミュレーション難度:C
コメント:足先IKにより歩容を実現しています.今のところ前進しかできません. |
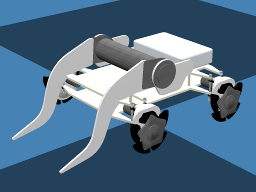
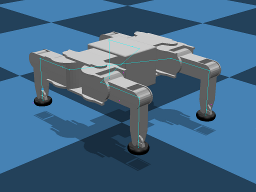
RHex
rhex |
 |
6足歩行ロボット
シミュレーション難度:B
コメント:構造が簡単なのでマニュアルの題材にしました. |
Curiosity
curiosity |
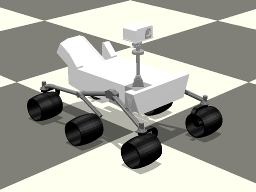 |
NASAの火星探査ローバ
コメント:ロッカーボギーの再現以外はいい加減です. |
