HMR-KK08からの変更点
MotorPIC/Servo用の回路/予備のMagne&Accel sensor
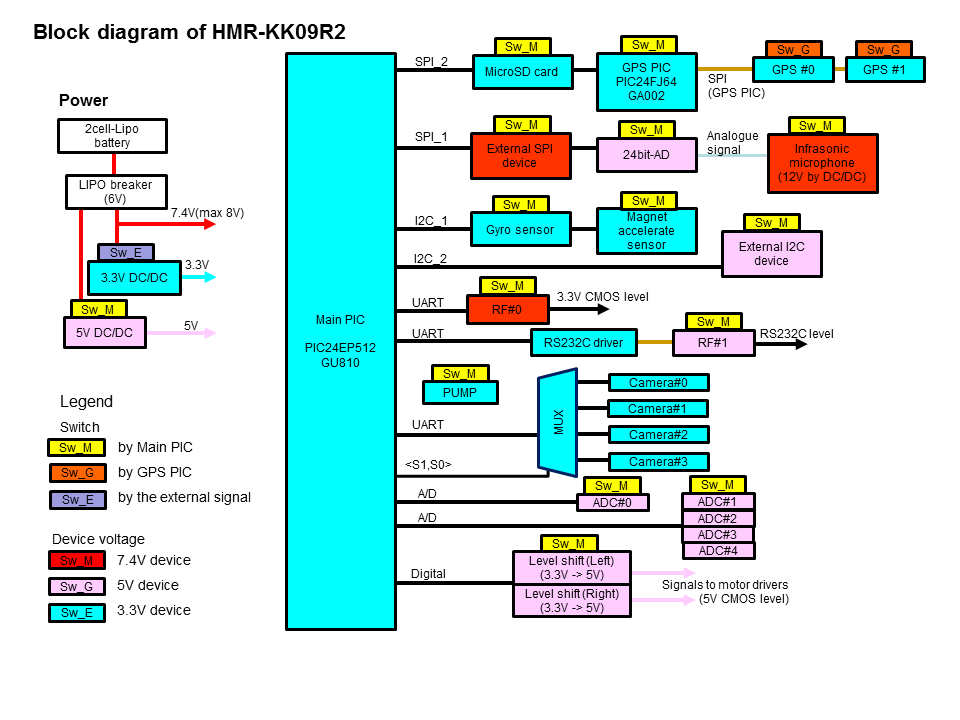
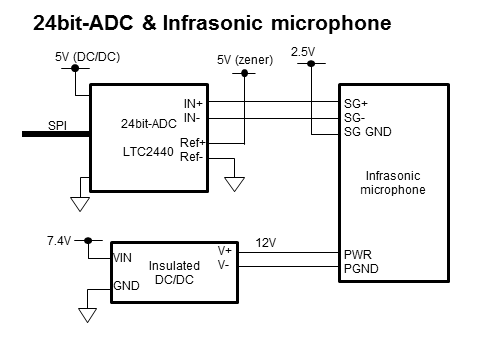
電源 すべてをDC/DCによるものに変更.基板上の電源は,7.4V (Lipo),3.3V(DC/DC,常にON),5V(DC/DC,MainPICによりON/OFF)の3種類となる.なお,低周波マイク専用に12VのDC/DCもある.
RF#0 Xbeeとの接続をデフォルトとすることにし,Rx,Tx,CTS,RTSをMainPICのUART線そのままにした.電源は7.4Vである.
Camera マルチプレクサによる切り替え(切替にはMainPICの<S1,S0>を使用)で,4つのカメラが接続できるようにした.<S1,S0>がOUTPUTになっている場合,カメラどれかの電源が入るようになっている.したがって,カメラを切る場合には,接続していないカメラチャンネルを指定する.4つとも電源を切りたい場合,<S1,S0>がINPUTにすればよい.
モータ用のレベル変換回路 Enable信号を廃止.その代り,電源そのもののON/OFFを行う.
ADC ADC#0は信号を1/2にアッテネートしてあり,CO2センサを接続する.ADC#1-3は信号そのまま.ADC#4は信号をアッテネートできるようにしてある(現在は未実装).
MicroSD card (SPI1, GPS PICと同じSPI2ライン)
24bit-ADC (LTC2440)および外部SPIデバイス用端子 SPI1ラインで制御する.
低周波マイク用の回路
・Mainboard全体の電源のON-OFFを外部からの信号で操作できる.
MainSWのVpinには,電源OFF時にも,LipoBreakerを通してバッテリ電源が供給されている.
MainSwのINPUTがHの場合, MainPICの電源が入る.Lの場合,電源が切れる.MainSWのVpinとInputPinをジャンパでショートすることにより,MainPICは常時ONになる.
MainSwのOUTPUTがLの場合, MainPICの電源を切るように設計する予定である.したがって,MainPICは起動したらすぐに,MainSwコネクタのOUTPUTをHにすること.全体の電源を切りたい場合,それをLにする.一旦LにしてMainPICの電源を切ったら,外部からの入力により,MainSwのINPUTが再度Hになるまで,Mainboardは動作しない.
電源OFF時にもLipoBreakerの分の電源消費がある.(おそらく数mA)
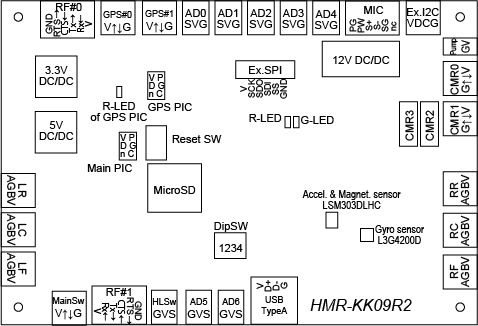
・Main PIC:PIC24EP512GU810(RAM52k) GPS PIC:PIC24FJ64GA002
・加速度磁気センサ: LSM303DLHC X 2 (I2C),ジャイロセンサ:L3G4200D X 1 (I2C)
加速度磁気センサおよびジャイロセンサの電源は,MainPICによりON-OFFする.また,I2Cとして,ASDA1およびASCL1を使う.
ジャイロセンサのI2Cスレーブアドレスは1101001(SA0ピンをVddに接続)
・RF#0(Xbee用,UARTレベル,RS232Cレベルではない,CTS/RTSによるハードウェアフロー制御可)の電源pinは,LipoBreakerを通してバッテリ電源が供給されている.MainPICにより,ON-OFF可能.
・RF#1(FOMA modem用,RS232Cレベル,CTS/RTSによるハードウェアフロー制御可)の電源pinは,5Vが供給されている.MainPICにより,ON-OFF可能.
・HLSw(ヘッドライト用のLEDのSW)の電源ピンは現在どこにも接続されていない.ヘッドライトへの電源は別に与えること.
・PICの未使用ピンは,ADを持つピンの場合,ADにセットしインプットに設定する.ADを持たないピンはデジタルアウトプットに設定する.
Power supply voltage of RF#0 is the battery's.
Power supply voltage of RF#1 is 5V.
Power supply voltage of MainSw is the battery's. If the input pin is H, the Main PIC works.
V pin of HLSw (the head light LED switch) is not connected.Non-connected pins with ADC are set as ADC and digital input. Non-connected pins without ADC are set as digital output.
!CAUTION! GPIO pins of B11 and B15 must be set as INPUT and are unusable.
| Pin | Port | ADC | RP | Special | etc | Power | Use | Setting | Function |
| 1 | MCLR | X | Reset | ||||||
| 2 | A00 | AN00 | Vref+ | CN2 | O | O | PowerSW of GPS#1 | ||
| 3 | A01 | AN01 | Vref- | CN3 | O | O | |||
| 4 | B00 | AN02 | 0 | C2IN-/CN4 | PGED1 | O | O | PGED | |
| 5 | B01 | AN03 | 1 | C2IN+/CN5 | PGEC1 | O | O | PGEC | |
| 6 | B02 | AN04 | 2 | SDA2 | C1IN-/CN6 | O | I | GPS#1 Rx | |
| 7 | B03 | AN05 | 3 | SCL2 | C1IN+/CN7 | O | O | GPS#1 Tx | |
| 8 | GND | ||||||||
| 9 | A02 | OSCI/CLKI/CN30 | X | ||||||
| 10 | A03 | OSCO/CLKL/CN29/PMA0 | X | ||||||
| 11 | B04 | 4 | SOSCI/PMBE/CN1 | X | |||||
| 12 | A04 | SOSCO/T1CK/CN0/PMA1 | X | ||||||
| 13 | Vdd | ||||||||
| 14 | B05 | 5 | ASDA1 | CN27/PMD7 | PGED3 | O | O | LED (ON in L) | |
| 15 | B06 | 6 | ASCL1 | CN24/PMD6 | O | I | SS | ||
| 16 | B07 | 7 | INT0 | CN23/PMD5 | O | O | SCK | ||
| 17 | B08 | 8 | SCL1 | TCK/CN22/PMD4 | O | I | SDO | ||
| 18 | B09 | 9 | SDA1 | TDO/CN21/PMD3 | O | I | SDI | ||
| 19 | DISVREG | ||||||||
| 20 | Vcap | ||||||||
| 21 | B10 | 10 | TDI/CN16/PMD2 | PGED2 | X | ||||
| 22 | B11 | 11 | TMS/CN15/PMD1 | PGEC2 | X | ||||
| 23 | B12 | AN12 | 12 | CN14/PMD0 | X | ||||
| 24 | B13 | AN11 | 13 | CN14/PMD0 | O | O | PowerSW of GPS#0 | ||
| 25 | B14 | AN10 | 14 | Cvref/TRCC/CN12/PMWR | O | I | GPS#0 Rx | ||
| 26 | B15 | AN09 | 15 | CN11/PMCS1 | O | O | GPS#0 Tx | ||
| 27 | GND | ||||||||
| 28 | Vdd |
Non-connected pins with ADC are set as ADC and digital input. Non-connected pins without ADC are set as digital output.
Mobile Sensor for Volcanic Observation "HOMURA"
火山観測用自走式センサー「ほむら」
ご意見、ご質問はまで
トップページへ
09-Jan-2014
更新