This study develops a trajectory generation method for mobile robots and autonomoous vehicles that utilizes pre-computed map information of the environment.
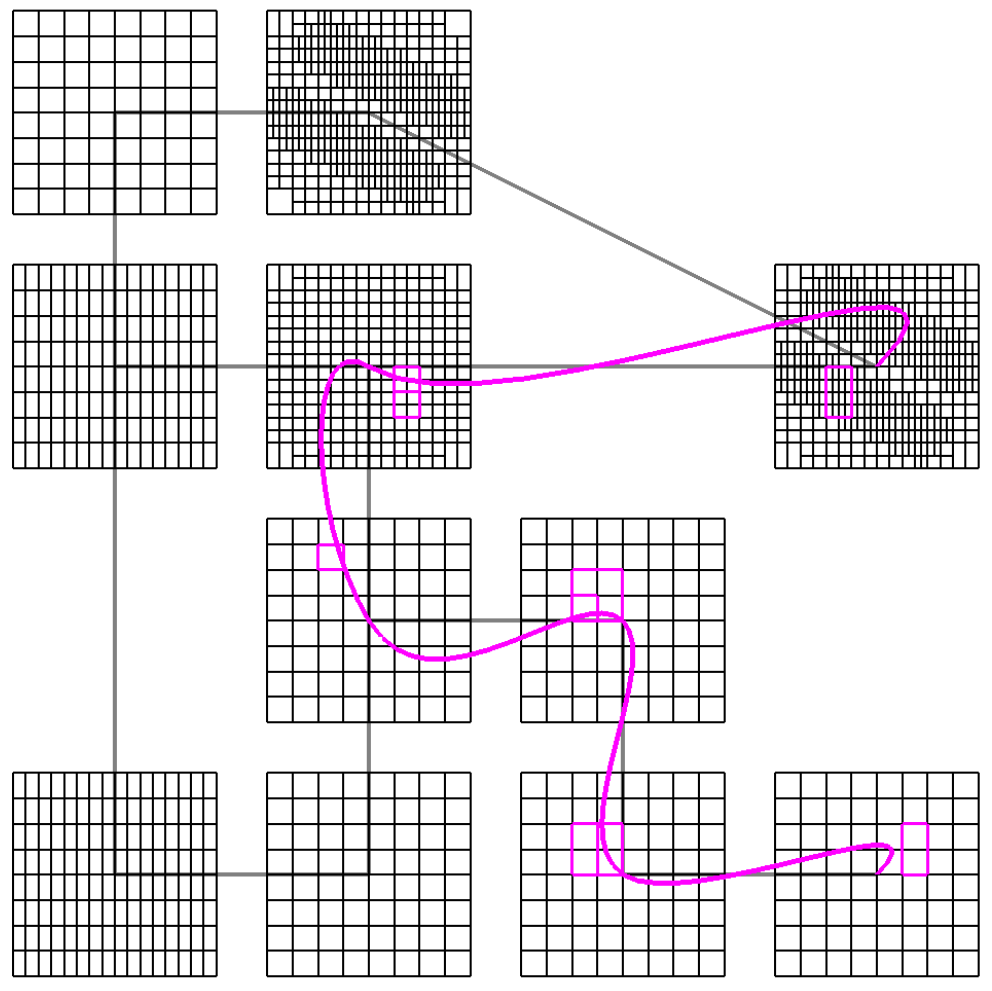
The state space (configuration space) of a mobile robot model is partitioned into intervals (boxes).
A transition is defined from one box to another if a robot can travel from any configuration in the first box to any configuration in the second box.
The boxes are subdivided into smaller boxes if necessary.
In this manner, we obtain a "map" of an environment that consists of configuration boxes in multiple resolutions.
This map can be utilized in the path planning phase for generating a trajectory connecting two configurations while satisfying physical constraints
by computing graph search on the map.
A number of waypoints are placed in the environment, and the configuration space of the vehicle
at each waypoint is divided into multiple intervals.
Each pair of intervals is checked whether the vehicle can travel between the corresponding waypoints
with terminal configurations chosen arbitrarily from these intervals.
When the check result is ambiguous, then these intervals are subdivided into smalle ones.
This map information can be utilized in the path planning phase to generated physical feasible
trajectories by means of graph search.
An omni-directional mobile robot. The velocity space is expressed by boxes.
A car-like mobile robot. The orientation space is expressed by intervals.
Autonomous Parking
The multi-resolution map technique is applied to autonomous parking.
Parking is challenging to both human drivers and autonomos cars because
i) a car must be steered to a narrow parking spot while avoiding other obstacles with very small margins,
ii) the moving direction of a car must be switched between forward and reverse if necessary,
and iii) trajectories with very large curvature must be utilized considering the limitation of steering angle.
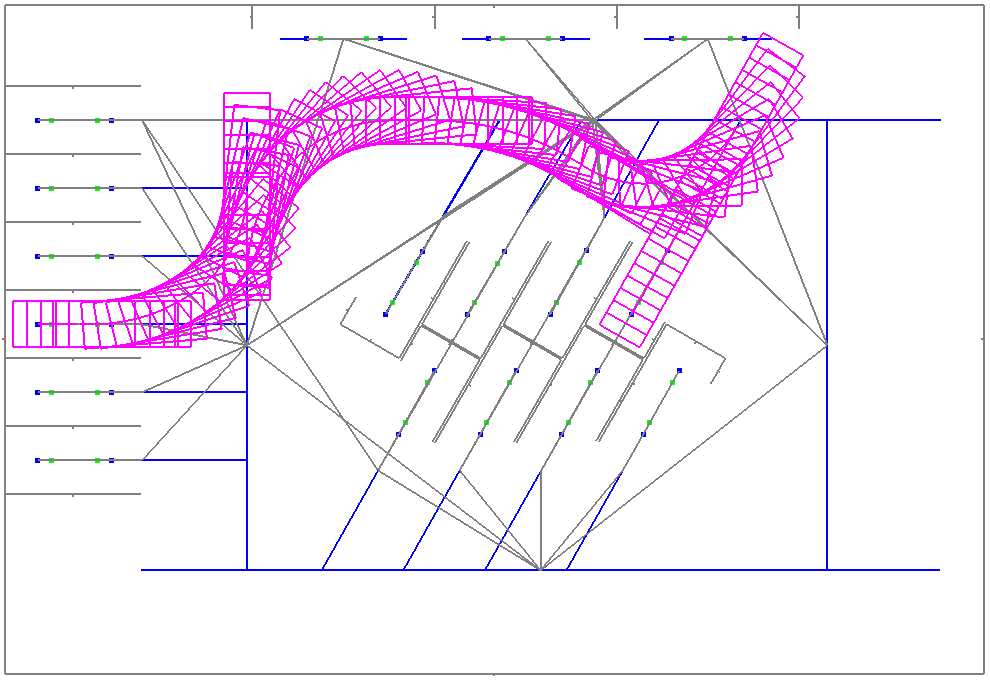
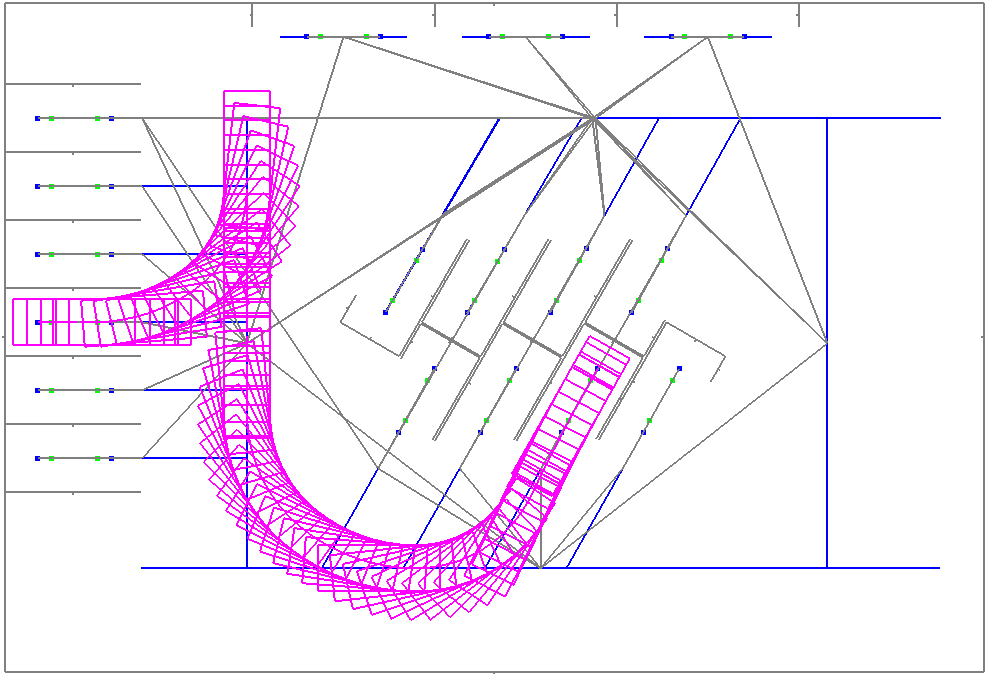
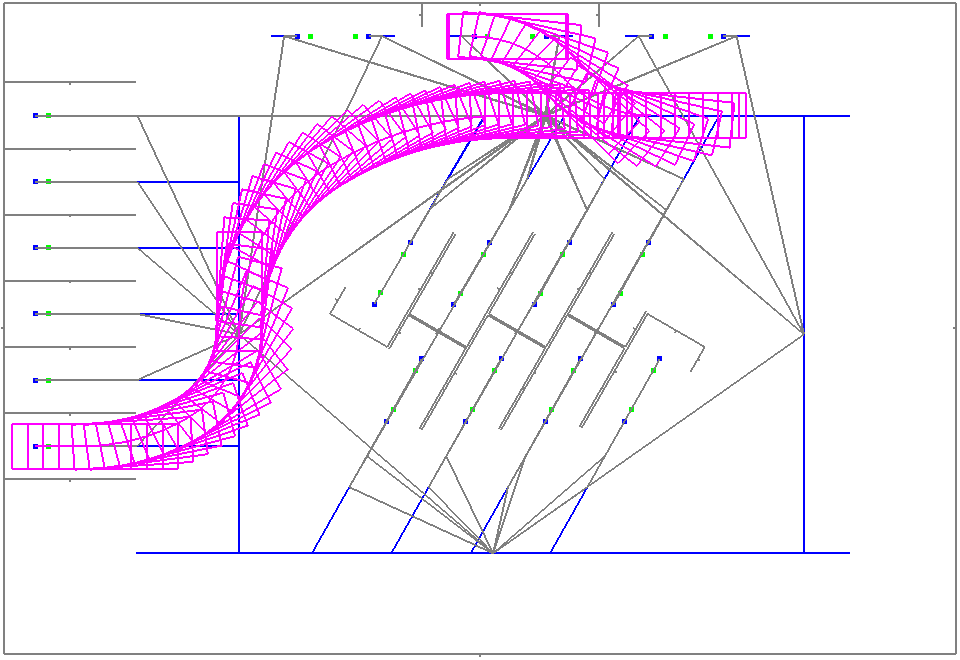
One solution to these problems is to construct an intelligent parking system that makes use of a digital map of the parking lot.
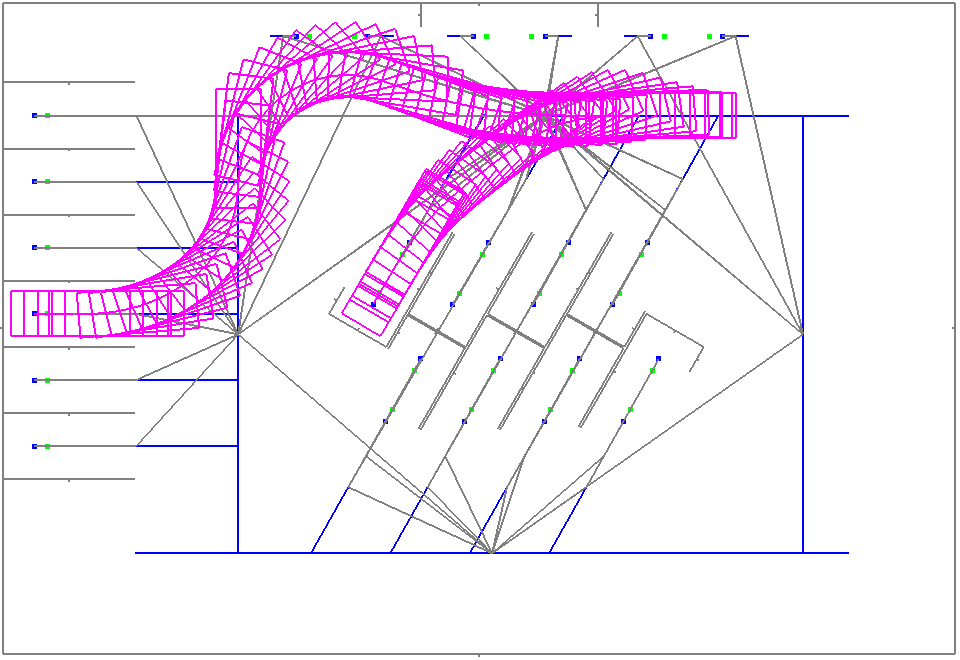
When a car enters the parking lot, the system quickly generates a reference trajectory to a parking spot by using a map,
and sends that data to the car via wireless network.
Then the car can by navigated to the parking spot just by tracking the provided reference trajectory.
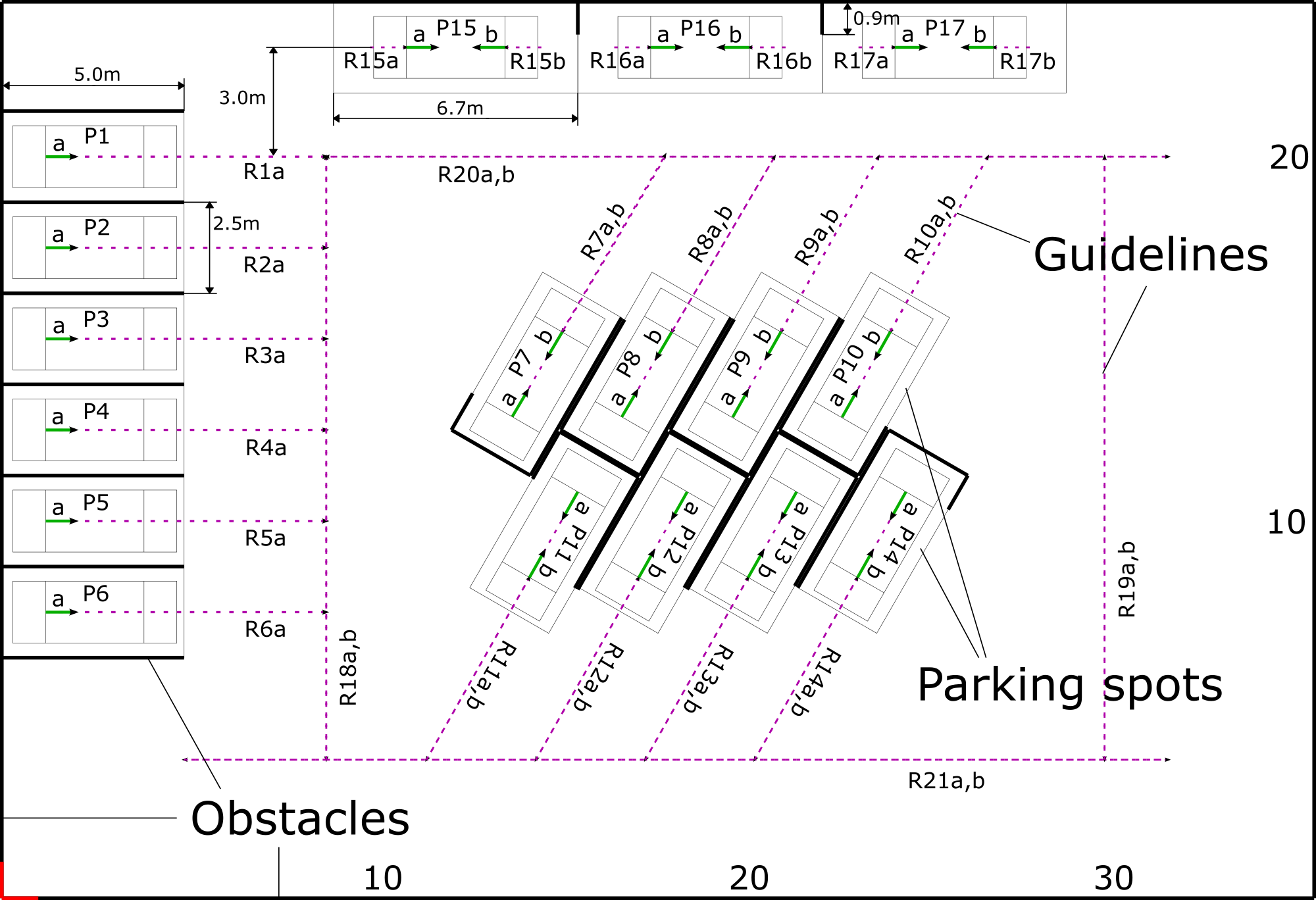
Map of a parking lot. This includes the layout of parking spots, obstacles, and guidelines.
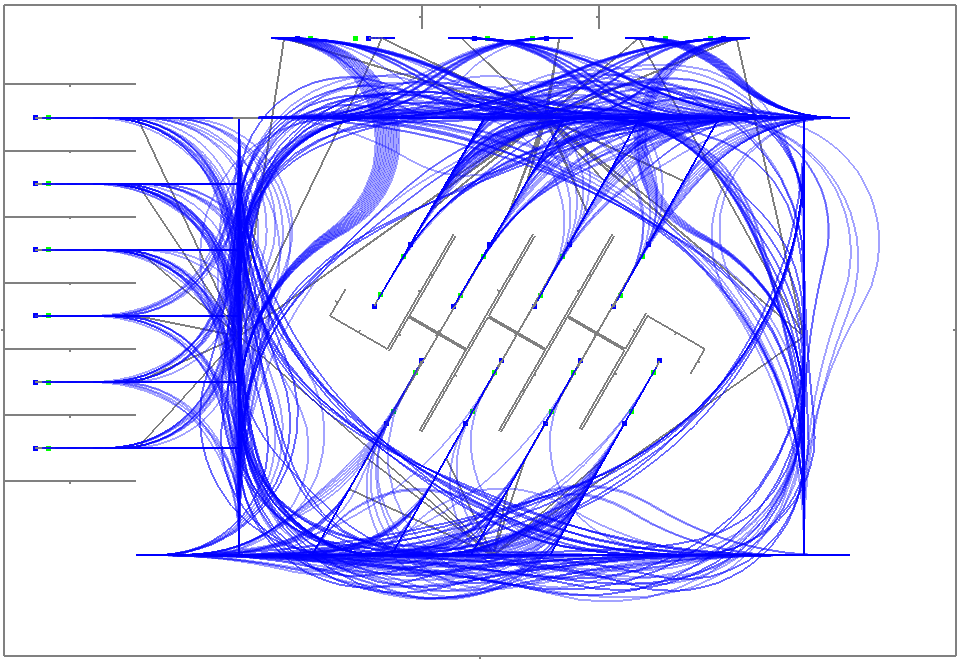
Guidelines are partitioned in multiple-resolutions and executabe trajectories between pairs of guidelines are precomputed.
Various planning trajectories can be generated in small computation time using the map.
パーソナルEVによる自動駐車デモ
Autonomos parking demo on personal EV
Related publications
[1]
Y. Tazaki, H. Okuda, T. Suzuki: Parking Trajectory Planning Using Multi-resolution State Roadmaps, IEEE Transactions on Intelligent Vehicles, Vol.2, No.4, pp.298-307, 2017.
[2]
Y. Tazaki, J. Xiang, T. Suzuki, and B. Levedahl: Multi-resolution State Roadmap Method for Trajectory Planning, IEICE Transactions on Fundamentals, Vol.E99-A, No.5, pp.954-962, 2016.
[3]
H. Fuji, Y. Tazaki et al: Trajectory Planning for Automated Parking Using Multi-Resolution State Roadmap Considering Non-Holonomic Constraints IEEE Intelligent Vehicles Symposium, pp.407-413, 2014.
[4]
J. Xiang, Y. Tazaki, T. Suzuki and B. Levedahl: Variable-Resolution Velocity-Time Roadmap Generation Considering Safety Constraints for Autonomous Vehicles, 52nd IEEE Conference on Decision and Control, Dec.10-13, Firenze, Italy, 2013.