|
| 紹介 |
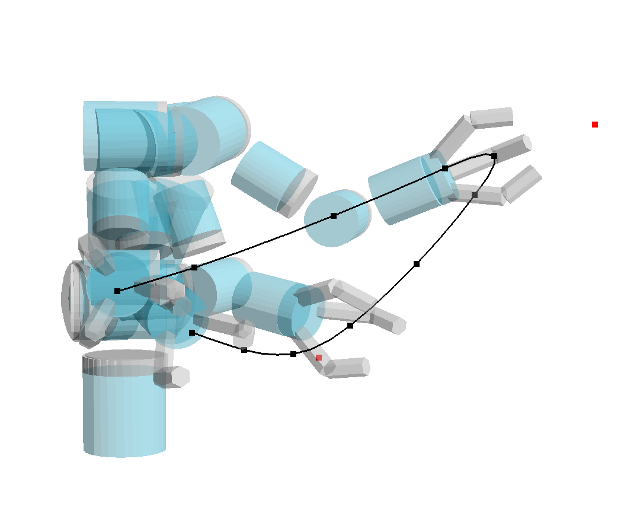
マルチボディとして表現されたロボットや作業環境上での動作計画を行うためのライブラリです.運動学・動力学的拘束に加えてロボットのタスク(作業)を拘束条件として課すことで,これらの拘束条件を充足する軌道が計画されます.
拘束には複数の優先度を割り当てることができます. |
| 動作環境 |
Windows + Visual C++ 2010
*ビルドにはSpringheadが必要です.別途インストールしてください. |
| 最新版ダウンロード |
dimp_20130807.zip |
| ドキュメント |
ユーザーマニュアルver20130807 |
| 動画 |
準備中 |
| 更新履歴 |
|
|
|
| 関連文献 |
田崎勇一,鈴木周一,鈴木達也: マルチボディシステムの拘束ベース多目的軌道計画,日本ロボット学会誌,Vol.31, No.5, pp.508-516 |
|
ご意見・ご質問はこちら: |
|