 2013年11月伊豆大島実験レポート2013年11月伊豆大島実験レポート
2013年11月伊豆大島実験レポート2013年11月伊豆大島実験レポート

2013年11月、観測ロボットを使った火山観測についての情報交換の場として、第5回伊豆大島無人観測ロボットシンポジウムが開かれた。それに参加させていただく形で、ほむらチームも三原山(伊豆大島の火山)の麓にて実地テストを行った。
2012年大島実験以降,これまで満足に行うことができなかった遠隔操縦の実現を目標に,ソフトウェア,ハードウェアの改良を行ってきた.具体的な変更点を以下に挙げる.
前年から試験的に搭載していた携帯電話(FOMA)による通信を中心として見直した.ほむらと操縦者の間の通信方式を見直すことで,通信速度が前年の2倍程度に向上した.
遠隔操縦を行うためには,機体の姿勢状態を把握する必要がある.今回は,機体にデジタルコンパス,ジャイロセンサを新たに搭載した。
火山活動の発生時には,活動状況の変化を追うために長時間の観測が必要となる場合がある.今回,ほむらの電源を遠隔でON/OFFにする機能や,一定時間ごとに自動的に測定する機能など,電力の消耗を最小に抑えつつ長時間の活動を可能にする機能を追加した.
前年の反省点として,プログラムの準備不足があげられる.今年は,制御システムの信頼性を上げるためにプログラム構造を一新した。
目視によらない長時間の操縦実験を行う。また、無人観測ロボットシンポジウムに参加し、情報交換を行うことが目的である。
今回、初めて全5日間の実験期間中、すべての操縦を遠隔操縦にて行った。操縦者は、ほむらから送られてくる姿勢データとカメラ、GPSデータのみを用いて操縦し、大島温泉ホテルから三原山を登り、ふもとまで降ろすことに成功した。
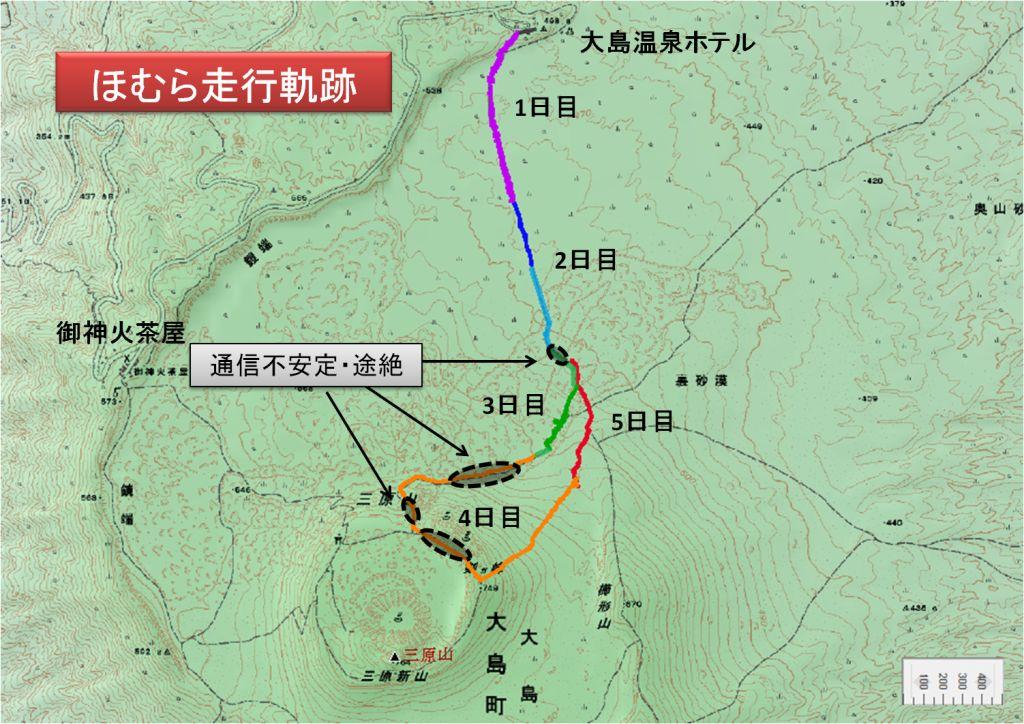
大島温泉ホテルを出発し、およそ1kmを2.5時間で走行した。途中何度か障害物に衝突し、モーターの交換も必要となったが、走破することに成功した。


↑登山道入り口より実験スタート ↑ホテルの一室の操縦システム


↑溝を発見・・・・ ↑できずに溝にはまる
前日停止した場所から,地図の1kmほどを走行した。途中溶岩流の丘を登り切ったところで通信状況が悪くなったため、少し後退して省電力モードで夜を越した。


↑三原山を望みながら走る ↑溶岩流上の登山道にて
前日停止した場所から地図の緑線部分の0.7kmほどを走行した。途中雨が激しくなり、機体の防水が不足しており機体内部が浸水したため実験を中止した。

↑激しい風雨の中ほむらの救出に向かう ↑発見されたほむら
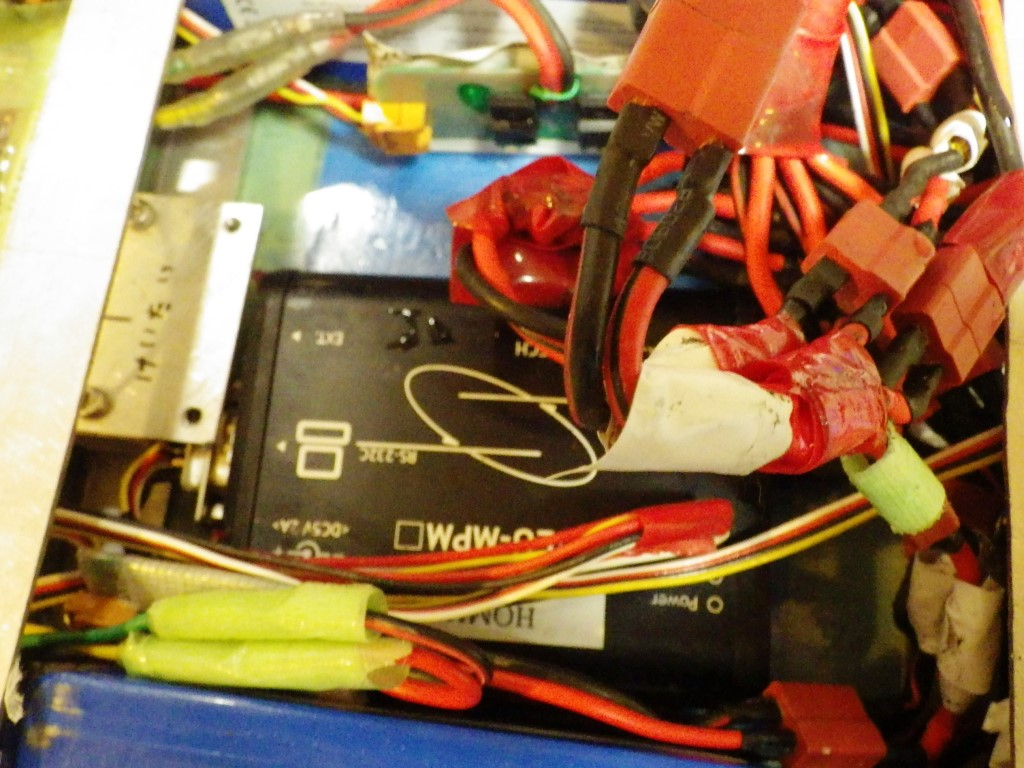

↑内部に浸水 ↑メンテナンス
前日中止した場所から地図の橙色線部分の1.7kmほどを走行した。途中、溶岩流や丘によってほむらの高さでは周囲を見通せなくなる場所があり、通信速度が極端に落ちたり、通信ができなくなった。まったく通信できない場所もあったので、通信可能な位置まで機体を動かして実験を再開した。この辺りから山頂まで傾斜角12度ほどの斜面が続いたが、遠隔操縦でも問題なく走ることができた。


↑登山道を登るほむら ↑登山中のほむらカメラ画像(クリックで【動画】再生)

↑頂上でほむらカメラで記念撮影
日没後、三原山外縁から斜度30度程度のスコリア斜面を降下し、裏砂漠を走行した。夜間であったが斜面の降下は難なくできた。しかし、裏砂漠では特徴点がないため、ほむらの高さからの写真では周囲の状況の把握が困難で、かつコンパスが信頼できない状況だったため、最終的にはには50cm程度の深さの溝にはまり、抜け出すことができずに省電力モードで夜を越した。


↑スコリア斜面を降下するほむら ↑降下中のほむらカメラの画像(クリックで【動画】再生)
前日停止した場所から地図の赤線部分の0.7kmほどを走行した。4日目から使い続けていたモーターの電池が赤線部分の半分程度の場所で切れたので、経路の中間地点でモーター用電池を交換した。省電力モードを使ったため、制御・通信系の電池は4日目から5日目の実験終了まで切れることなく動き続けた。


↑溝にはまっていたほむら ↑裏砂漠を快走するほむら
ほむら走行速度(時速3km程度)に対して時間がかかっているのは、遠隔操縦では画像を確認しながら走行する必要があるためと、途中携帯電話の通信状況が悪化したりモーターギアが破損して修理を余儀なくされたためである。
今回の実験で、通信可能域に制約はあったものの、遠隔操縦でもカメラや姿勢センサを駆使することで登山道および裏砂漠でほむらを長時間操縦できることが確認できた。また、丸2日間(通常モード10時間・省電力モード15時間程度)ほむらを動かし続けても、制御・通信系の電池にはまだ余裕があることも分かった。そのため、遠隔操縦により、ほむらが火口内で長期間定期的に観測することも可能であるといえる。今後火山観測に必要な観測機器を充実させる予定である。
遠隔操縦では周りの状況が把握しづらく、斜面などでは車輪が滑ってまっすぐ進むことが困難であったため、センサ情報をもとに自動で直進をするなどの操縦を支援するシステムがあるとより早く目的地まで遠隔操縦でたどり着けると考えられる。 また、途中モータのギアが破損して走行できなくなることが数回あったため、ギアを破損しない構造を考える必要がある。
 まで
まで