 2009年10月大島実験レポート2009年10月大島実験レポート
2009年10月大島実験レポート2009年10月大島実験レポート
2009年10月、観測ロボットを使った火山観測についての情報交換する場として、伊豆大島無人観測ロボットシンポジウムが開かれた。それに参加させていただく形で、ほむらチームも三原山(伊豆大島)での運用試験を行った。2回目の火山近傍での運用となり、前回の阿蘇実験をふまえた非常に有意義なものにすることができた。
今回の変更点を以下に上げる。
全車軸をチェーンで連結し、負荷のかかっていない車軸の動力を負荷のかかっている車軸に伝えるように改良した。さらに、チェーンによって車軸が歪まないようにベアリングをはめたアルミ棒で固定した。左右のアルミ棒同士を紐で縛ることで、車輪が外れる問題も解決した。
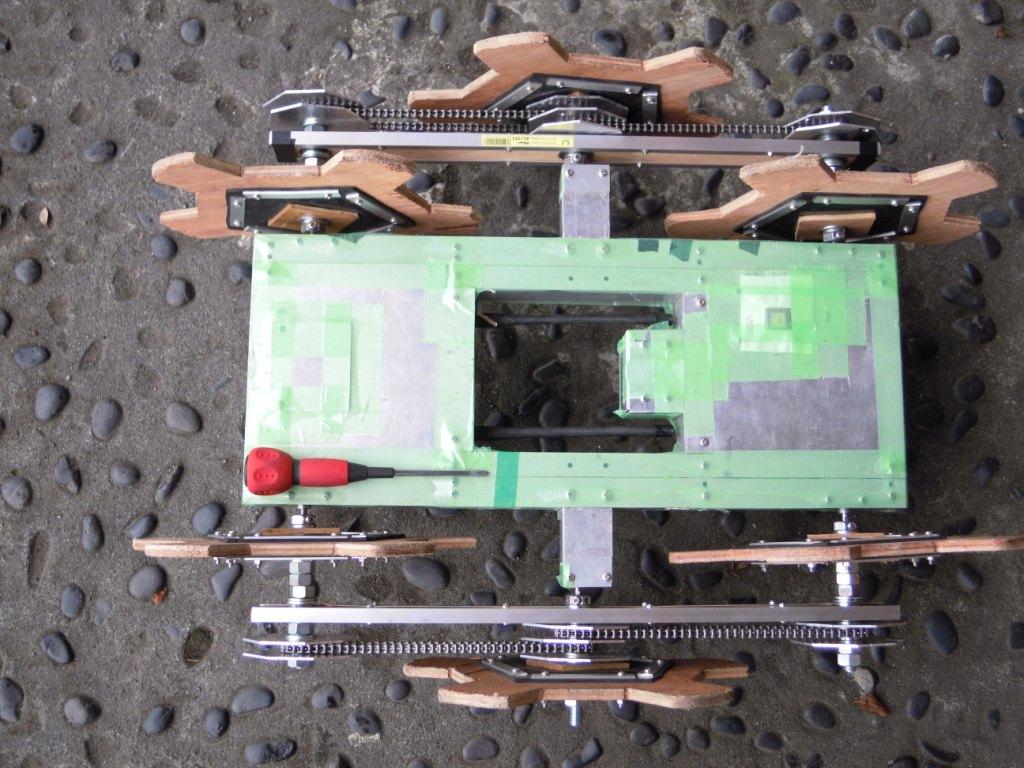

タイヤ(足)に自転車のスポークの要領でゴムを挟み、衝撃を和らげるようにした。これにより、ギアへの負担も少し軽減したと思われる。
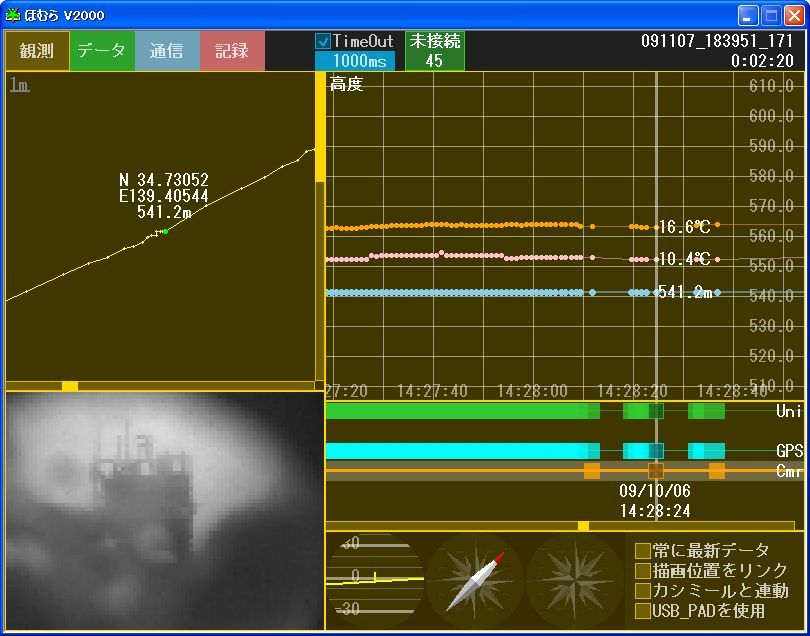
通信途絶対策として、中継基地を設置できるようにした。また、カシミールとGPSのリンクによって現在位置が分かるようにし、電子コンパスを搭載して進行方向も取得するようにした。
充電の際の放電が不要なエネループを実装した。これにより、放電をする手間を省くことができるようになった。
ほむらの機体用ソフト、制御用ソフトの両方を、拡張性を重視した上で再設計した。さらに、遠隔操縦がより容易となるような機能や観測データのグラフ化なども搭載した。
前回の阿蘇実験において得られた問題点について改良を加えたうえでの再実験。 また、阿蘇とは違った性質をもつ火山地形における走破性能の検証と、新たな観測ソフトウェアの実地試験、シンポジウムにおける情報交換。
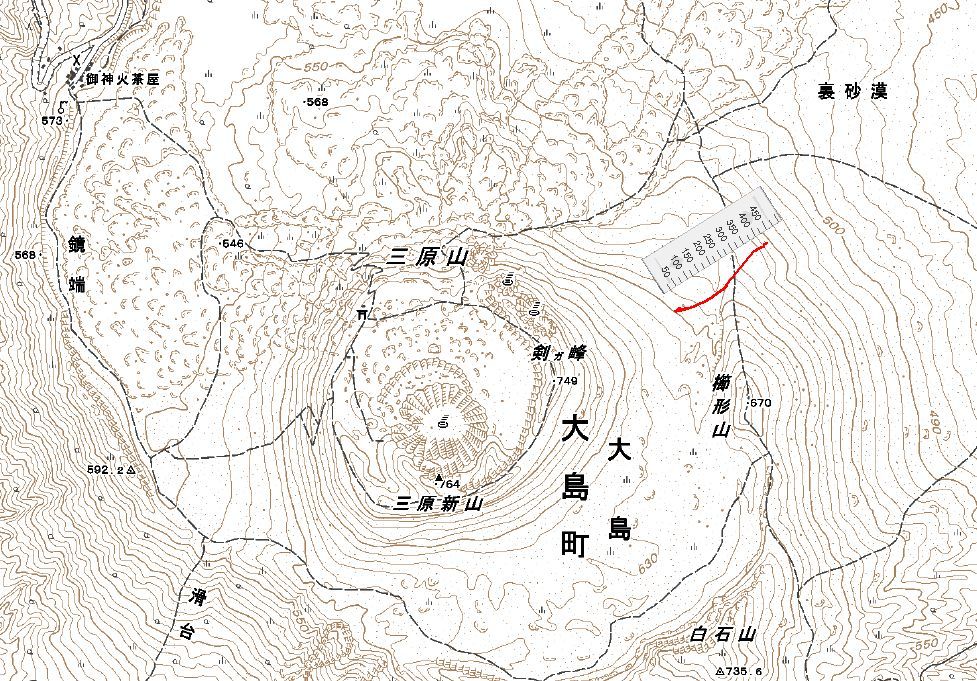
三原山山腹のカルデラ内において、ほむらから取得されるカメラデータ、GPS情報、電子コンパスの情報をもとに目視なしで一部遠隔操作を行った。新プログラムに移行し、観測情報の扱いやすさが上がった。また、GPS情報についても、上図のように、周りに遮蔽物がない状態では遜色なく得ることができ、遠隔走行の大きな一助となった。しかしながら、依然として無線機は前回の阿蘇のときの物を使用しているので、カメラ取得に時間がかかり情報が不十分なため、完全な遠隔操縦には隔たりがあった。今後は携帯電話等の端末を使った通信についても考慮する必要がある。

傾斜30度ぐらいの坂を利用して、登坂能力のテストを行った。チェーン連結により動力が上がり、登坂においては実用に足る程度になったことが確認できた。さらに登坂能力を上げるべく、今後は重心の移動も考慮してもよいかもしれない。
前回の問題点であった、走行中に足が外れてしまう問題については、上記の改良によって今回の実験では外れなかった。 また、モーター内部のギアが破壊される問題については、足にゴムを付けたものの、依然として未解決であった。今後、モーター軸に負担をかけない工夫が必要だが、荒れ地を走行するという特徴上ある程度はやむを得ないものなのかもしれない。


(左)東北大学の火山探査移動観測ステーションMOVEを追うほむら。霧が濃い。
(右)溶岩流の礫の上に挑むほむら。問題なく走行できた。
今回の連続走行時間は約1時間30分ほどで、エネループに変えたことによる影響はほとんど見られなかった。放電が不要になったため、充電効率は非常に良くなった。
無線機の中継器も用意したが、通信状況に関して今回はテストできなかった。
記念すべき第一回伊豆大島無人観測ロボットシンポジウムにも関わらず、台風18号は順調に伊豆大島に進路を向けていた。しかも、予報では直撃コース。初日から濃い霧の中スタートし、二日目は完全に雨霧。裏砂漠は本当になにもないので、視界がきかないと本当に迷子になる。実際、二日目の帰りには道がわからなくなり、10分ほど右往左往する事態となった。三日目には風も強くなってきたため、最悪伊豆大島に閉じ込められる危険性もあったため、予定を2日残して打ち切りとなってしまった。仕方なくあきらめて京都に戻ると・・・結局台風は伊豆大島ではなく伊勢湾方面へ。悪天候で今回は十分時間の取れない実験となってしまった。
 まで
まで