CPU傪PIC32MZ2048EFG100偵曄峏乮Aug., 2015乯
HMR-KK09R2偐傜偺曄峏揰
GPSPIC傪姰慡偵攑巭
CAMERA#2, #3偍傛傃儅儖僠僾儗僋僒偵傛傞愗傝懼偊
MainPIC PIC32MZ2048ECM100偵曄峏乮ADC偼10bit乯丆偝傜偵PIC32MZ2048EFG100偵曄峏乮ADC偼12bit乯丏
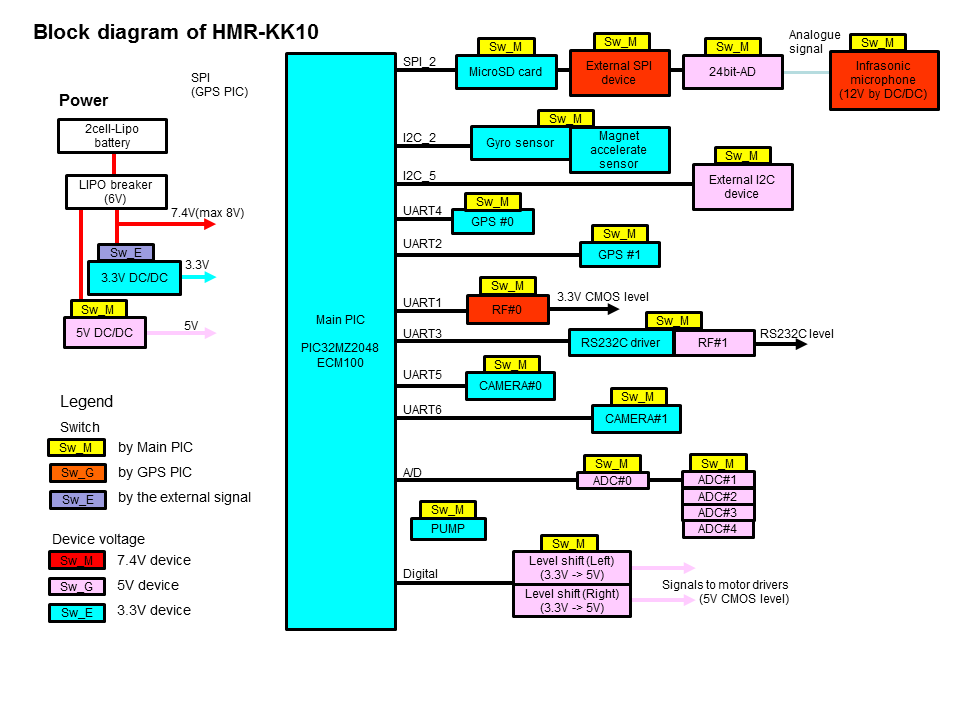
GPS 2偮偺GPS傪捈愙MainPIC偺UART偵偮側偖丏揹尮傕MainPIC傛傝ON/OFF偡傞丏
SPI丂偡傋偰偺SPI僨僶僀僗偼SPI2偵偮側偑傟傞丏
CAMERA 2偮偺僇儊儔偼偦傟偧傟捈愙MainPIC偺UART偵偮側偖丏
偲偔偵側偟
丒Mainboard慡懱偺揹尮偺ON-OFF傪奜晹偐傜偺怣崋偱憖嶌偱偒傞丏
MainSW偺Vpin偵偼丆揹尮OFF帪偵傕丆LipoBreaker傪捠偟偰僶僢僥儕揹尮偑嫙媼偝傟偰偄傞丏
MainSw偺INPUT偑H偺応崌丆 MainPIC偺揹尮偑擖傞丏L偺応崌丆揹尮偑愗傟傞丏MainSW偺Vpin偲InputPin傪僕儍儞僷偱僔儑乕僩偡傞偙偲偵傛傝丆MainPIC偼忢帪ON偵側傞丏
MainSw偺OUTPUT偑L偺応崌丆 MainPIC偺揹尮傪愗傞傛偆偵愝寁偡傞梊掕偱偁傞丏偟偨偑偭偰丆MainPIC偼婲摦偟偨傜偡偖偵丆MainSw僐僱僋僞偺OUTPUT傪H偵偡傞偙偲丏慡懱偺揹尮傪愗傝偨偄応崌丆偦傟傪L偵偡傞丏堦扷L偵偟偰MainPIC偺揹尮傪愗偭偨傜丆奜晹偐傜偺擖椡偵傛傝丆MainSw偺INPUT偑嵞搙H偵側傞傑偱丆Mainboard偼摦嶌偟側偄丏
揹尮OFF帪偵傕LipoBreaker偺暘偺揹尮徚旓偑偁傞丏乮偍偦傜偔悢mA乯
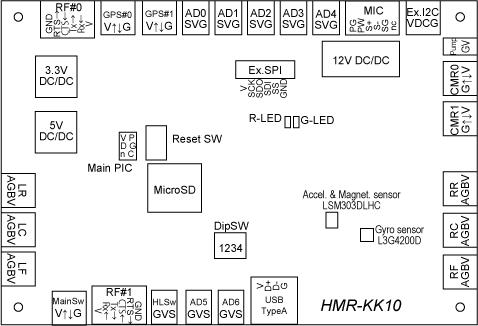
丒Main PIC丗PIC32MZ2048ECM100丂PIC32MZ2048EFG100
丒壛懍搙帴婥僙儞僒丗 LSM303DLHC X 1 (I2C)丆僕儍僀儘僙儞僒丗L3G4200D X 1 (I2C)
壛懍搙帴婥僙儞僒偍傛傃僕儍僀儘僙儞僒偺揹尮偼丆MainPIC偵傛傝ON-OFF偡傞丏傑偨丆I2C偲偟偰丆ASDA1偍傛傃ASCL1傪巊偆丏
僕儍僀儘僙儞僒偺I2C僗儗乕僽傾僪儗僗偼1101001乮SA0僺儞傪Vdd偵愙懕乯
丒RF#0乮Xbee梡丆UART儗儀儖丆RS俀俁俀C儗儀儖偱偼側偄丆CTS/RTS偵傛傞僴乕僪僂僃傾僼儘乕惂屼壜乯偺揹尮pin偼丆LipoBreaker傪捠偟偰僶僢僥儕揹尮偑嫙媼偝傟偰偄傞丏MainPIC偵傛傝丆ON-OFF壜擻丏
丒RF#1乮FOMA modem梡丆RS俀俁俀C儗儀儖丆CTS/RTS偵傛傞僴乕僪僂僃傾僼儘乕惂屼壜乯偺揹尮pin偼丆5V偑嫙媼偝傟偰偄傞丏MainPIC偵傛傝丆ON-OFF壜擻丏
丒HLSw乮僿僢僪儔僀僩梡偺LED偺SW乯偺揹尮僺儞偼尰嵼偳偙偵傕愙懕偝傟偰偄側偄丏僿僢僪儔僀僩傊偺揹尮偼暿偵梌偊傞偙偲丏
丒PIC偺枹巊梡僺儞偼丆AD傪帩偮僺儞偺応崌丆AD偵僙僢僩偟僀儞僾僢僩偵愝掕偡傞丏AD傪帩偨側偄僺儞偼僨僕僞儖僀儞僾僢僩偵愝掕偡傞丏
Power supply voltage of RF#0 is the battery's.
Power supply voltage of RF#1 is 5V.
Power supply voltage of MainSw is the battery's. If the input pin is H, the Main PIC works.
V pin of HLSw (the head light LED switch) is not connected.PIC32MZ2048EFM100偲PIC32MZ2048EFG100偺僺儞傾僒僀儞偼摨堦偱偁傞丏
| Pin | Port | ADC | RP | Special | etc | Power | Setting | Function |
| 1 | G15 | AN23 | O | Left motor B | ||||
| 2 | A05 | AN34 | O | Left motor A | ||||
| 3 | E05 | AN17 | R | O | PowerSW of level shifter of signal for motor | |||
| 4 | E06 | AN16 | AD | ADC for Battery voltage of RF (10/43 att) | ||||
| 5 | E07 | AN15 | O | nSS of SD card | ||||
| 6 | C01 | AN22 | R | AD | ADC for Battery voltage of Mainboard (10/43 att) | |||
| 7 | C02 | AN21 | R | I | GPS#0 Rx | |||
| 8 | C03 | AN20 | R | O | GPS#0 Tx | |||
| 9 | C04 | AN19 | R | O | PowerSW of 5V DC/DC | |||
| 10 | G06 | AN14 | R | SCK2 | O | SPI2-SCK | ||
| 11 | G07 | AN13 | R | SDA4 | I | SPI2-SDI | ||
| 12 | G08 | AN12 | R | SCL4 | O | SPI2-SDO | ||
| 13 | Vss | GND | ||||||
| 14 | Vdd | Vdd | ||||||
| 15 | MCLR | Reset | ||||||
| 16 | G09 | AN11 | R | O | PowerSW of RF#0 | |||
| 17 | A00 | AN24 | O | PowerSW for GPS#0 | ||||
| 18 | E08 | AN25 | R | O | GPS#1 Tx | |||
| 19 | E09 | AN26 | R | I | GPS#1 Rx | |||
| 20 | B05 | AN45 | R | O | PowerSW for GPS#1 | |||
| 21 | B04 | AN04 | O | PowerSW for ADC#00 | ||||
| 22 | B03 | AN03 | R | AD | ADC #00 (1/2 att for CO2 sensor) | |||
| 23 | B02 | AN02 | R | O | PowerSW for ADC#01-04 | |||
| 24 | B01 | AN01 | R | PGEC1 | AD | ADC #01 | ||
| 25 | B00 | AN00 | R | PGED1 | AD | |||
| 26 | B06 | AN46 | R | PGEC2 | I | PGEC2 | ||
| 27 | B07 | AN47 | R | PGED2 | I | PGED2 | ||
| 28 | A09 | AN27 | Vref- | AD | ADC #02 | |||
| 29 | A10 | AN47 | Vref+ | I | Reference voltage (2.5V) | |||
| 30 | AVdd | AVdd | ||||||
| 31 | AVss | AVss | ||||||
| 32 | B08 | AN48 | R | AD | ADC #03 | |||
| 33 | B09 | AN59 | R | AD | ADC #04 (attenated signal) | |||
| 34 | B10 | AN05 | R | O | PowerSW of external SPI device | |||
| 35 | B11 | AN06 | AD | Path of Vdd (Only input) | ||||
| 36 | Vss | GND | ||||||
| 37 | Vdd | Vdd | ||||||
| 38 | A01 | AN29 | O | PowerSW of 24bit-ADC | ||||
| 39 | F13 | AN30 | R | SCK5 | O | PowerSW of CAM#1 | ||
| 40 | F12 | AN31 | R | O | PowerSW of CAM#0 | |||
| 41 | B12 | AN07 | O | nSS of external SPI device | ||||
| 42 | B13 | AN08 | O | nSS of 24bits-ADC | ||||
| 43 | B14 | AN09 | R | SCK3 | O | PowerSW of PUMP | ||
| 44 | B15 | AN10 | R | AD | Path of Vdd (Only input) | |||
| 45 | Vss | GND | ||||||
| 46 | Vdd | Vdd | ||||||
| 47 | D14 | AN32 | R | I | Rx of CAM#0 | |||
| 48 | D15 | AN33 | R | SCK6 | O | Tx of CAM#0 | ||
| 49 | C12 | O | LED Red (ON in L) | |||||
| 50 | C15 | O | LED Green (ON in L) | |||||
| 51 | Vbus | |||||||
| 52 | Vusb3V3 | Vusb3V3 | ||||||
| 53 | Vss | GND | ||||||
| 54 | D- | USB D- | ||||||
| 55 | D+ | USB D+ | ||||||
| 56 | F03 | R | O | Tx of CAM#1 | ||||
| 57 | F02 | R | SDA3 | I | Rx of CAM#1 | |||
| 58 | F08 | R | SCL3 | O | PowerSW of Infrasonic microphone | |||
| 59 | A02 | SCL2 | O | SCL_I2C for external I2C device | ||||
| 60 | A03 | SDA2 | I/O | SDA_I2C for external I2C device | ||||
| 61 | A04 | O | PowerSW of external I2C device | |||||
| 62 | Vdd | Vdd | ||||||
| 63 | Vss | GND | ||||||
| 64 | F04 | R | SDA5 | I/O | SDA_I2C for MagAccelSensor and GyroSensor | |||
| 65 | F05 | R | SCL5 | O | SCL_I2C for MagAccelSensor and GyroSensor | |||
| 66 | A14 | R | SCL1 | I | ||||
| 67 | A15 | R | SDA1 | I | ||||
| 68 | D09 | R | I | CTS of RF#0 | ||||
| 69 | D10 | R | SCK4 | |||||
| 70 | D11 | R | O | PowerSW of MagAccelSensor and GyroSensor (ON in H) | ||||
| 71 | D0 | R | RTCC | O | RTS of RF#0 | |||
| 72 | C13 | R | O | Tx of RF#0 | ||||
| 73 | C14 | R | I | Rx of RF#0 | ||||
| 74 | Vdd | Vdd | ||||||
| 75 | Vss | GND | ||||||
| 76 | D01 | R | I | DRDY/INT2 of GyroSensor | ||||
| 77 | D02 | R | O | Tx of RF#1 | ||||
| 78 | D03 | R | I | Rx of RF#1 | ||||
| 79 | D12 | R | I | |||||
| 80 | D13 | I | ||||||
| 81 | D04 | R | O | RTS of RF#1 | ||||
| 82 | D05 | R | I | CTS of RF#1 | ||||
| 83 | Vdd | Vdd | ||||||
| 84 | Vss | GND | ||||||
| 85 | F00 | R | O | Right motor B | ||||
| 86 | F01 | R | O | RIght motor A | ||||
| 87 | G01 | R | O | PowerSW for USB device | ||||
| 88 | G00 | R | I | DipSW#4 | ||||
| 89 | A06 | I | DipSW#3 | |||||
| 90 | A07 | I | DipSW#2 | |||||
| 91 | E00 | I | DipSW#1 | |||||
| 92 | Vss | GND | ||||||
| 93 | Vdd | Vdd | ||||||
| 94 | E01 | I | ||||||
| 95 | G14 | I | ||||||
| 96 | G12 | O | PowerSW of SDcard | |||||
| 97 | G13 | O | PowerSw of Front LED | |||||
| 98 | E02 | O | PowerSW of RF#1 | |||||
| 99 | E03 | R | O | OUTPUT of external SW | ||||
| 100 | E04 | AN18 | AD | ADC of Left mortor battery (10/43 att.) |
Non-connected pins with ADC are set as ADC and digital input. Non-connected pins without ADC are set as digital input.
!CAUTION! GPIO pins of B11 and B15 must be set as INPUT and are unusable.
Mobile Sensor for Volcanic Observation "HOMURA"
壩嶳娤應梡帺憱幃僙儞僒乕乽傎傓傜乿
偛堄尒丄偛幙栤偼傑偱
僩僢僾儁乕僕傊
22-Aug-2015
峏怴