HMR-KK01の問題点
・カメラやGPSをソフトウエアUARTにより接続しており,そのデータ取得時にはCPUが他の作業をすることができない.そのため,その間,走行の制御が行えない.
・PIC18F2520はメモリ量が少なく(4kb),カメラ画像などの大量のデータを扱うために力不足である.
このため,HMR-KK02を作成した.
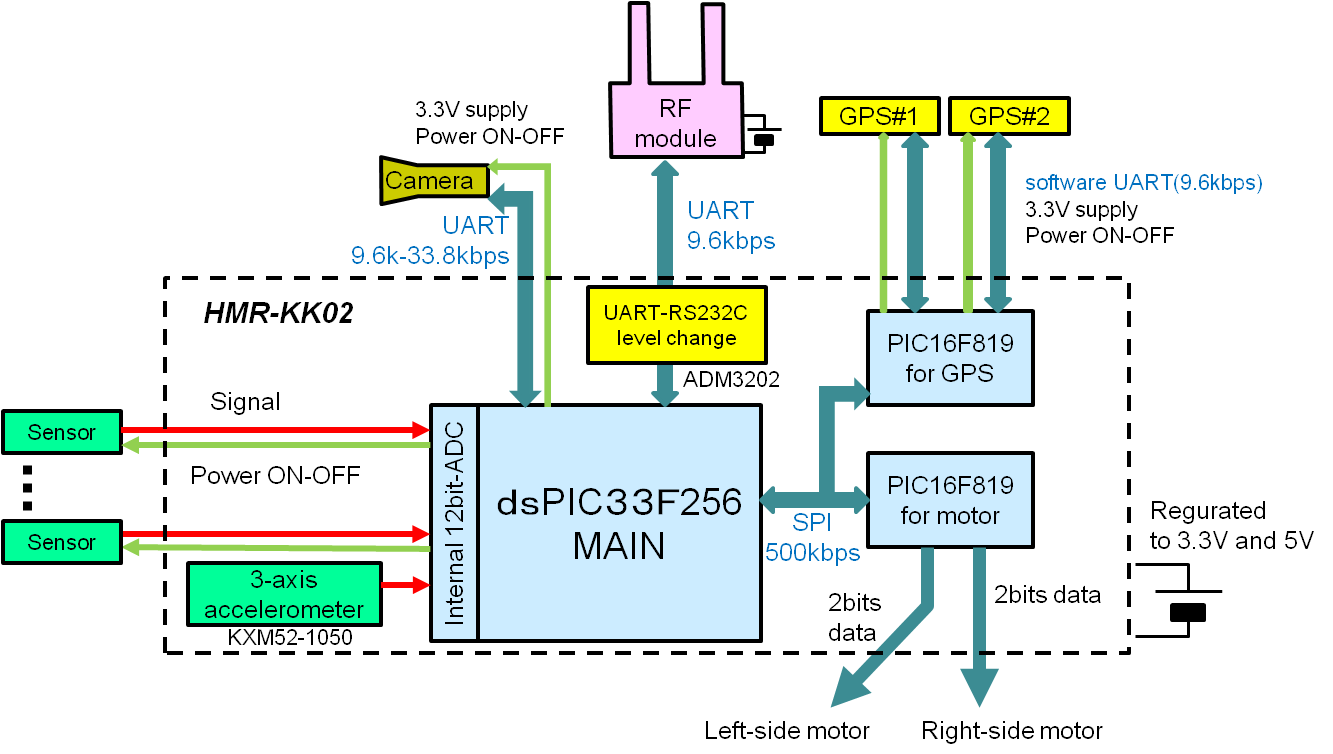
・メインのマイコンは,dsPIC33F256GP710(16bit, 32kb RAM, 12bit ADC)を用いる.
・GPSおよびモーターを,それぞれ独立したマイコンにより制御する.マイコンはPIC16F819を使用する.
・ADCは,dsPIC33の内部ADCが12bit分解能であるため,これを用いる.
not available
Mobile Sensor for Volcanic Observation "HOMURA"