まず開発当初,ほむらの基本的な機能,無線操縦により走ること,センサによりリアルタイムデータを基地局に送信することを試験することを目的として製作した.基地局からの無線送信データを受け取り,それに応じ,走行,センサーによる測定,データの基地局への送出を行う.ユニバーサル基板で作成した.ソフトウエア開発にはCCS Cを使用した.
Specification
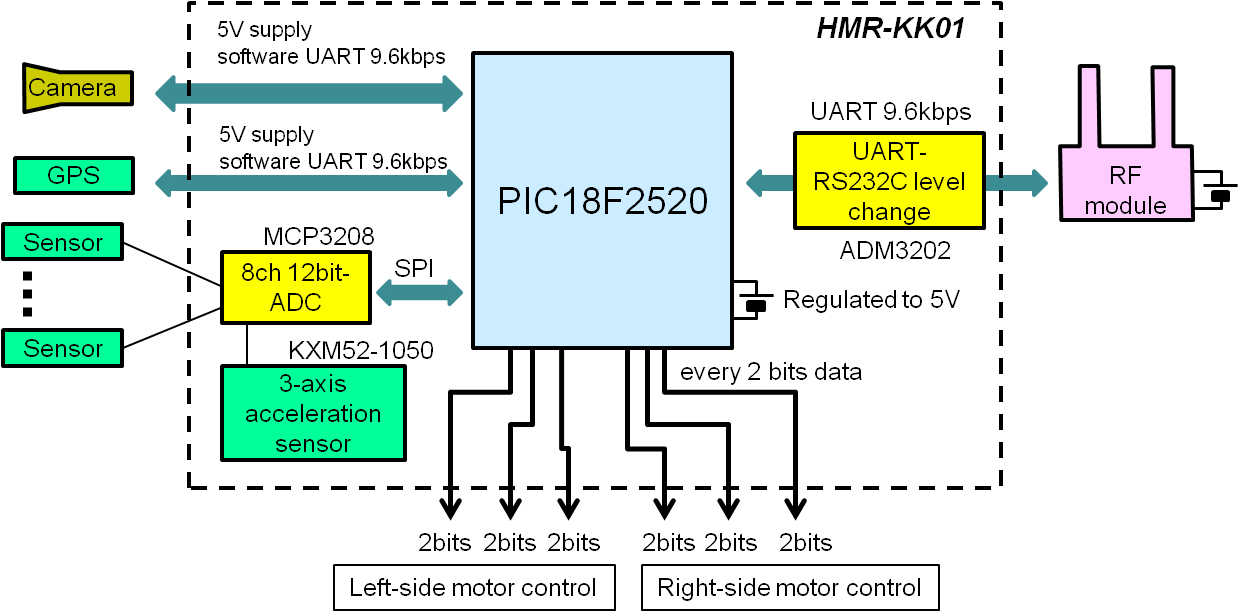
Computer : PIC18F2520
AD converter : MCP3208(8ch, 12bit, SPI comunication). Only the 3-axis accelerometer for aquisition of HOMURA posture is on the board.
Each of 6 motosr is controlled indenpendently by 2 bits data.
Software UART (CCS C) is used to communicate with CAMERA and GPS.

Mobile Sensor for Volcanic Observation "HOMURA"